 |
| Image Credit: Shuang Wu. |
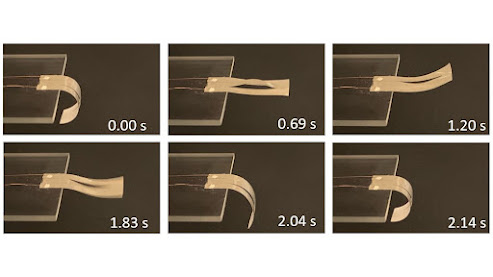
Researchers from North Carolina State University have come up with a new design for thermal actuators, which can be used to create rapid movement in soft robotic devices.
“Using thermal actuation is not new for soft robots, but the biggest challenge for soft thermal actuators was that they were relatively slow – and we’ve made them fast,” says Yong Zhu, corresponding author of the paper and the Andrew A. Adams Distinguished Professor of Mechanical and Aerospace Engineering at NC State.
Actuators are the parts of a device – such as a soft robot – that create motion by converting energy into work.
“What makes this new actuator design work is a structure with a bi-stable design,” says Shuang Wu, first author of the paper and a Ph.D. student at NC State. “Think of a snap hair clip. It’s stable until you apply a certain amount of energy (by bending it over), and then it snaps into a different shape – which is also stable.”
In the case of the new thermal actuator, the material is bi-stable, but which shape the material prefers is dictated by temperature.
Here’s how that works. The researchers layer two materials on top of each other, with silver nanowires in the middle. The two materials have different coefficients of thermal expansion, which means they expand at different rates as they heat up. In practical terms, that means the structure bends when you heat it.











.jpg)
